
國內的新能源汽車正如火如荼發展,如何才能構建一致性更好的車載CAN總線網絡?讓我們從國際標准開始學習。
ISO11898是CAN總線國際標準,由德國BOSCH公司開發至今已經成為汽車控制系統的標準總線協議,而今國內新能源汽車發展隨著雙積分制已經開始對傳統車企大面積普及,為了在轉型過程中提高汽車穩定性,國際標準的研讀成為重中之重。
圖1 新能源汽車CAN總線透視圖
任何一種通訊協議都要基於物理介質去構建,那麼高速(發送速率1Mbps)介質有哪些特性值得我們注意的呢?今天我們以《ISO11898-2:高速介質訪問單元》作為切入點去了解這份國標。
一、介質的特性
1、總線電平
(1)總線能有兩種邏輯狀態中的一個:接收或發送(見圖2)。
在接收狀態,VCAN_L和VCAN_H固定在平均電平,由總線終端決定。Vdiff低於最大閾值時,接收狀態在總線空閒和接收數據位期間傳遞。
圖2 CAN總線邏輯狀態
(2)在物理介質方面,CAN網絡線束拓撲應盡量接近單根線的結構,線纜所使用的雙絞線保持在一米50絞左右,外裹一層屏蔽線,有效減少干擾信號對差分電壓的影響,同時也避免線束反射波,而其d和l的距離需要達到一定程度。
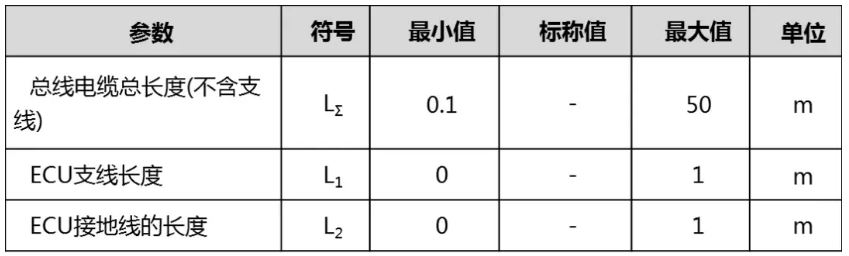
LS-CAN網段拓撲結構採用總線型拓撲結構,如圖3所示,具體數值見表1。通信速率是125 k~500kbit/s,除此之外,還需要滿足下列技術要求:
-
為了減小駐波,各ECU距離幹線的長度不能相等,同時應避免ECU在總線上等間距佈置,即任何兩個ECU之間d值不能相等;
-
診斷接口到診斷設備的距離不允許超過5 m。
圖3 車身CAN網絡拓撲圖
表1 網段拓撲結構
(3)小結
根據上述特性,我們在做車身總線設計時,需要控制好從站到主站的距離以及從站與從站間的距離,避免距離過大或過小引起信號失真或幅值不足等問題。
二、一致性測試
1、概述
介質訪問單元的一致性應當遵循ISO16845規范進行測試,其中以CAN_H和CAN_L分別對地或兩者之間的阻抗、容抗、總線傳輸延時為主。
(1)CAN_L和CAN_H相對於地的內部終端電阻
Rin_L和Rin_H由Rtest確定,計算公式如下:
圖4 CAN_L和CAN_H相對於地的內部終端電阻測試等效圖
(2)內部差分電阻
Rdiff由總線空閒期間Rtest確定:
圖5 內部差分電阻測試等效圖
(3)內部延時測量法
內部延時tnode測量應當在通過在空閒狀態,錯誤有效的CAN節點的CAN總線輸入一個發送位。CAN節點應當認為這個發送位為幀的起始位並執行硬件二次同步。CAN控制器應當在發送位後的第六個接收位檢測到填充錯誤,並且作為有效的錯誤標誌響應。外部發送發送位到錯誤標誌開始之間的時間為tedge o to o edgeo o 。
t ∆ edge=6 ∙ NBT − (toutputRD − toutputDR) o
tinputRD+toutputRD=tedge_to_edge − 7 ∙ NBT+sync o
同步條件能通過調整相位消除,得到tedge o to o edgeo o 最大值(CAN核採樣誤差最大:1tq)。
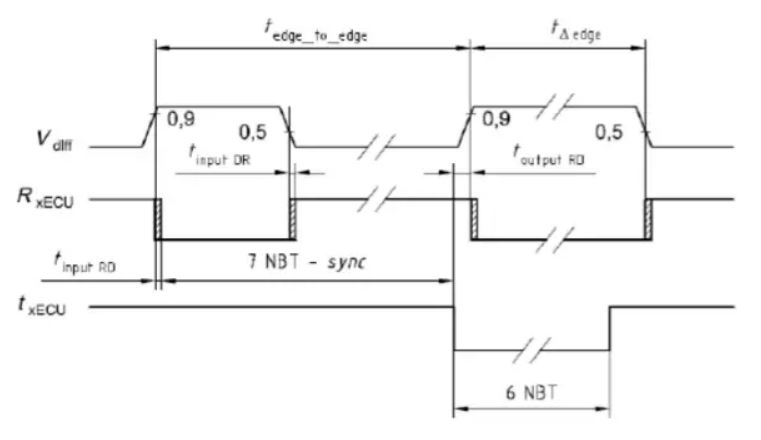
圖6 內部傳輸延時測量
2、IOS11898一致性測試快捷可靠的方法
要用萬用表、Excel數據加計算公式的方式將上述的內部傳輸延時、阻抗、容抗、CAN節點接收發送輸出輸入、等數十種測試項做完效率極低且準確度不高,人為計算錯誤的情況較多,所以CANscope總線分析儀的一鍵測試上述一致性的項目在效率和權威性上有極大的提升。

圖7 一致性測試四大觀測界面
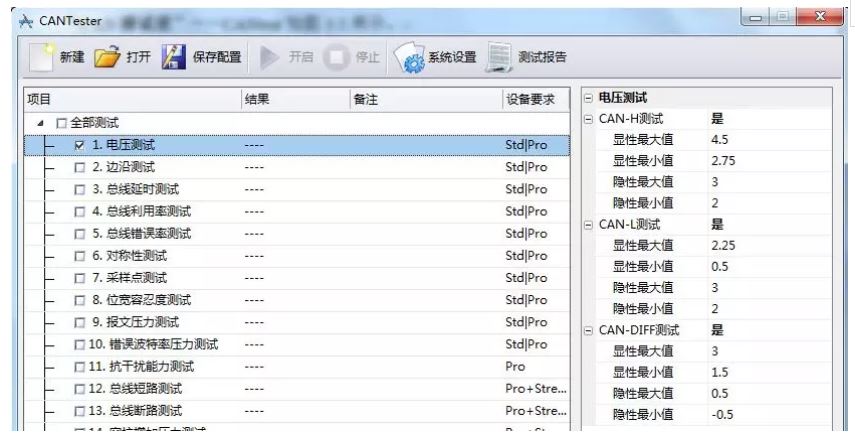
圖8 CANTester物理層與數據鏈路層一致性測試部分項目
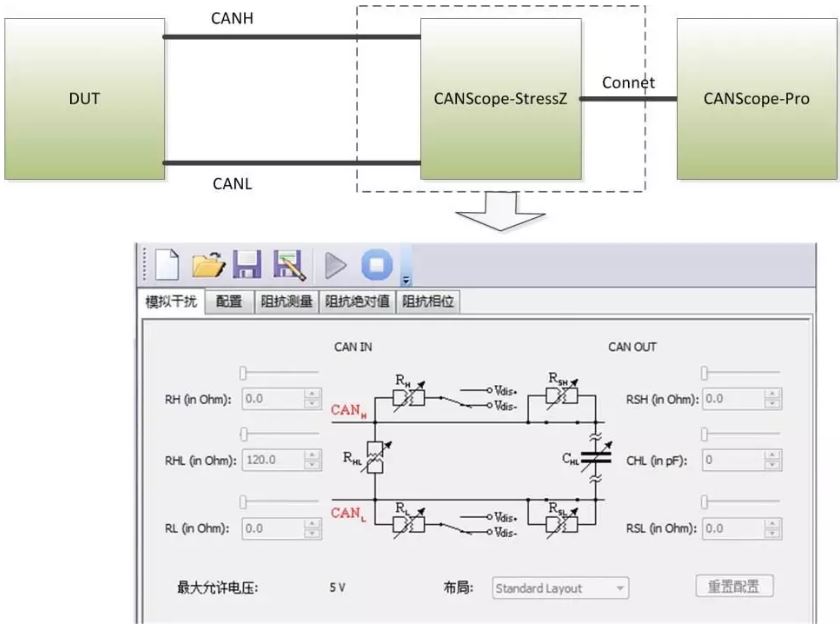
圖9 等效電路功能進行輸入電容電阻等測試


- 0 個商品