
【CAN高階】帶您認識ISO11898-3:低速容錯接入單元
日期:2018-04-09
新能源汽車發展的過程中,車載CAN網絡故障時有發生,低速容錯CAN協議有哪些方法值得我們學習?
ISO11898-2的解讀對高速CAN學習大有裨益,但除了高速CAN,低速容錯CAN也是CAN協議家族中重要的一員,低速和高速CAN雖然都使用同樣的屏蔽雙絞線連接,但物理介質和有關接口卻有不同的規定,同時,低速容錯協議對於故障定義也有不同。
圖1 新能源汽車CAN總線透視圖
基於物理介質及介質有關接口我們能更好的了解通訊協議的構建,那麽低速(發送速率40k~125kbps)容錯的物理層有哪些特性值得我們註意的呢?今天我們通過解讀《ISO11898-3:低速 容錯介質相關接口》繼續了解這份重要國標。
1. 介質的特性
1.1 CAN分層架構
1.1.1 圖2重點描述了容錯低速CAN收發器物理層及一部分數據鏈路層。
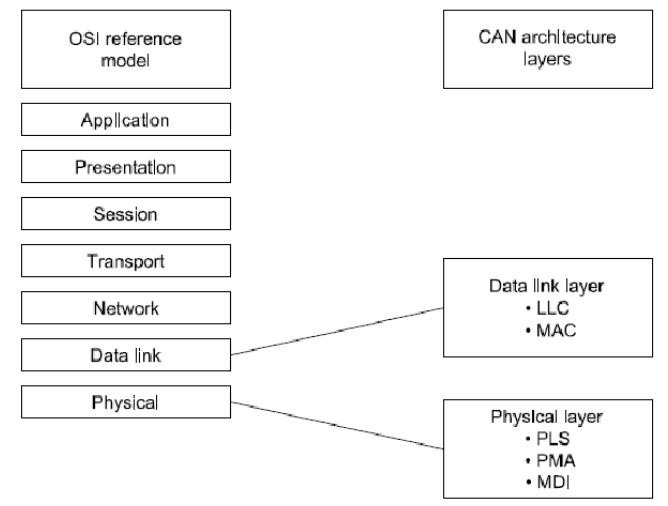
圖2 ISO參考模型/CAN分層架構
數據鏈路層
LLC:邏輯鏈路控制
MAC:介質訪問控制
物理層
PLS:物理層信號
PMA:物理介質接入設備
MDI: 介質專用接口
也就意味著,根據ISO11898-3的描述,我們想要了解低速容錯協議,我們需要了解MDI也需要了解PLS等,所以接下來,我們會重點介紹上述物理層中的的幾個組成部分。
2. 低速容錯介質專用接口說明
先來看看什麽是容錯CAN,容錯CAN的物理層是由CAN_H、CAN_L和GND三根線組成的。
2.1 低速容錯CAN協議物理介質
應使用平行(更推薦屏蔽的雙絞)線作為CAN傳輸的物理介質,這一點在CAN協議中是共識,良好的屏蔽和雙絞程度有利於滿足更高的EMC需求,為CAN傳輸提供穩定可靠的物理環境。
2.1.1 低速容錯CAN協議節點與總線的連接
CAN_H和CAN_L兩條電纜在終端節點網絡結束,每條線束的所有終端電阻應該大於100Ω。圖中終端電阻a是可選的,也就意味著在特定條件下,不是所有的節點都需要加單個終端電阻。
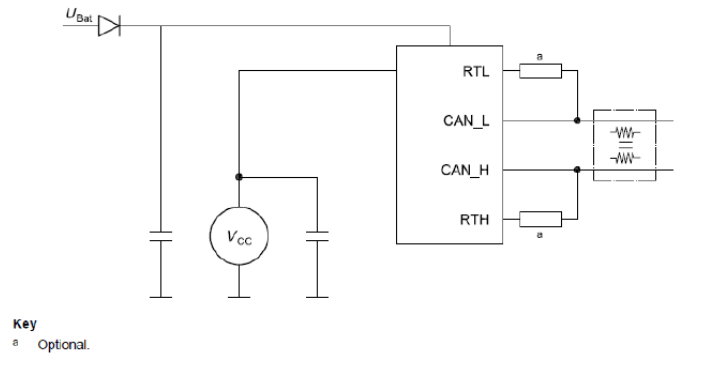
圖3 CAN信號總線終端節點
2.1.2 物理信號(PLS)
總線有兩種邏輯狀態:顯性和隱性。他們之間以差分電平作為區分:
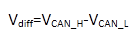
在隱性狀態時,CAN_L電平高於CAN_H,差分電壓DIFF為負數,所以隱性狀態在總線空閑或隱性位時傳輸。在顯性狀態時正好相反,CAN_H電平高於CAN_L,差分電壓DIFF為正數,顯性狀態覆蓋隱性狀態,並在顯性位傳送。下圖中a段表示隱性,b段為顯性。
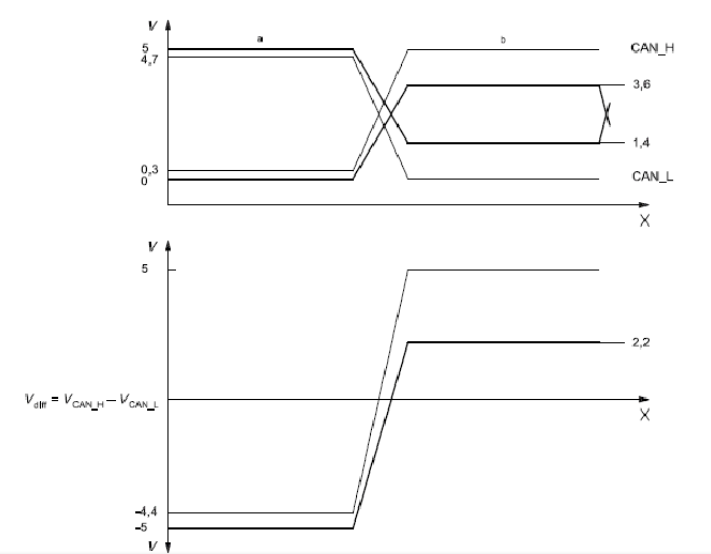
圖4 物理位表示
2.1.3 網絡規範
單個CAN節點可通過“總線拓撲”或“星型拓撲”兩種方式聯入通信網絡(見下圖,其中數字表示單個節點序號)。
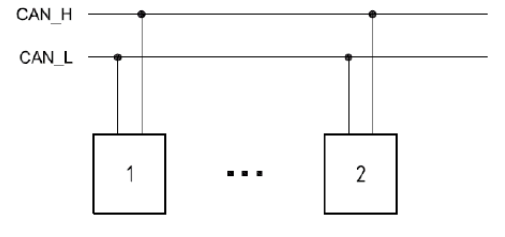
圖5 總線拓撲
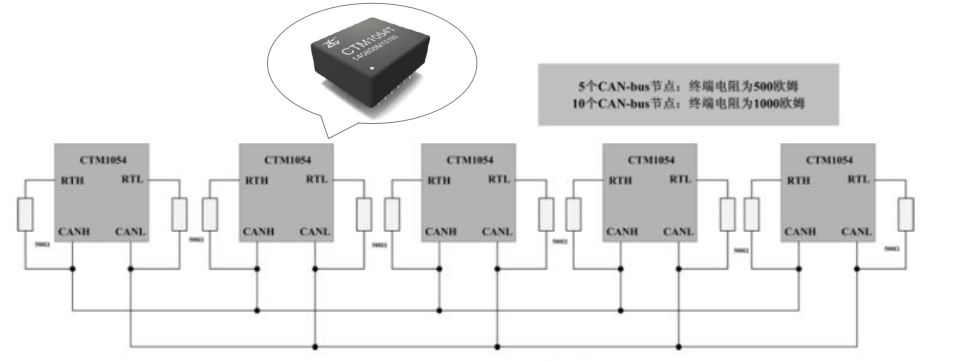
圖6 致遠CTM1054T容錯CAN隔離收發器拓撲圖
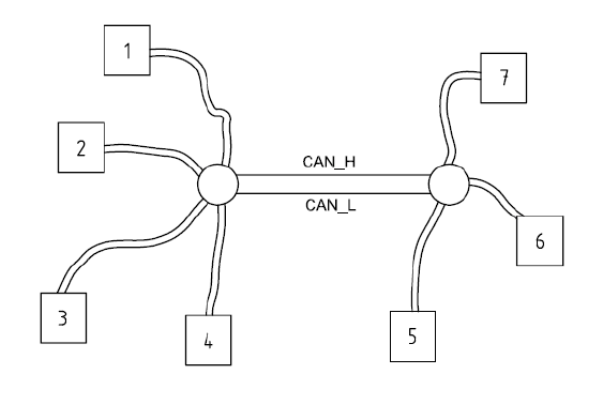
圖7 星型拓撲
2.1.4 物理介質故障定義
下表中規定的物理故障描述對應容錯收發器的故障。
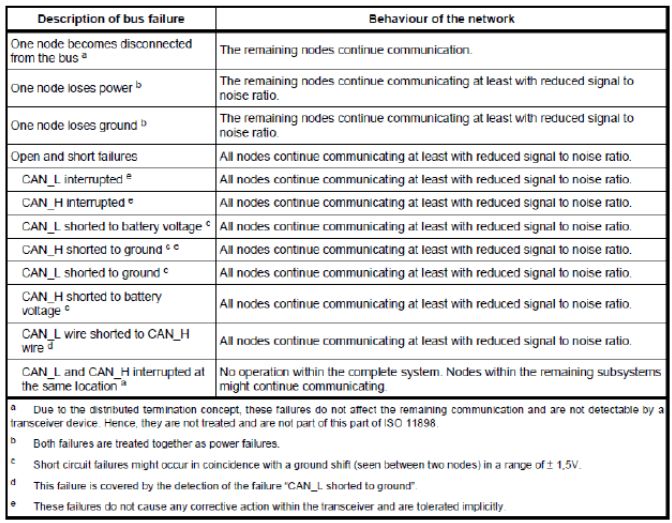
圖8 物理故障
物理故障會影響到總線的正常通訊,這些故障我們稱之為故障事件,而事件一般可以分為兩大類:電源故障和總線故障,一般情況下檢測到故障事件時,會引發收發器內部重啟。
電源故障:如果一個節點與地/電源斷開(或者地大於所定義極限值的±1.5V),這種故障稱之為電源故障;
總線故障:不是所有的總線故障都能被收發器識別,因此定義了可查詢的略縮事件組,見下圖。
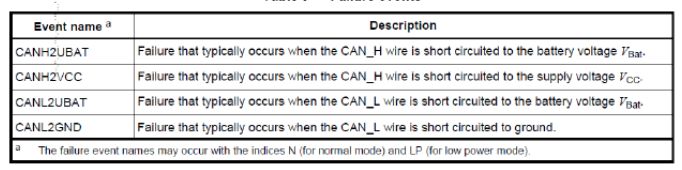
圖9 錯誤事件
2.2 IOS11898故障精確定位快速排除的方法
通過查閱上表中的錯誤事件可以大概定位錯誤部分,但對於具體的錯誤節點ID、錯誤類型、錯誤場段、解決方式等並不知道,所以如何精確快速的定位到錯誤的報文與波形成為檢測效率提升的關鍵。
CANscope總線分析儀是CAN總線故障定位、幹擾排除、可靠性測試全球唯一的解決方案,兼容CAN總線各種主流協議,也就意味著在各種現在施行或將來升級的標準,CANscope都能及時兼容更新,一致性測試更全、更快、更可靠。

圖10 CANscope總線分析儀
圖11 CANscope內部集成了容錯CAN收發器

圖12 一致性測試四大觀測界面
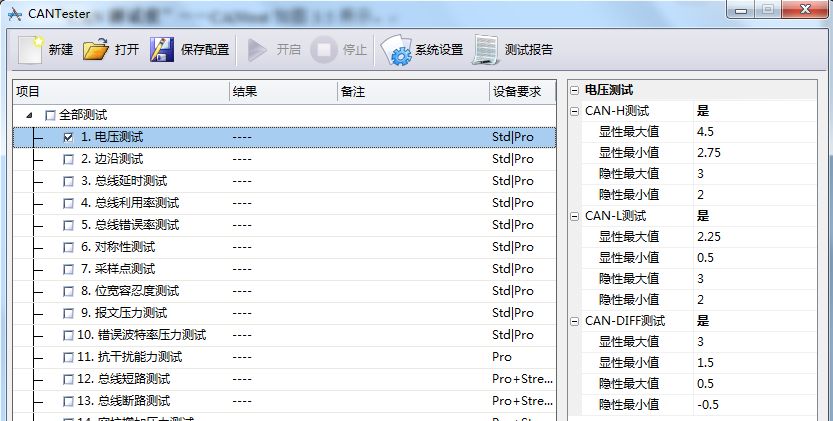
圖13 CANTester物理層與數據鏈路層一致性測試部分項目
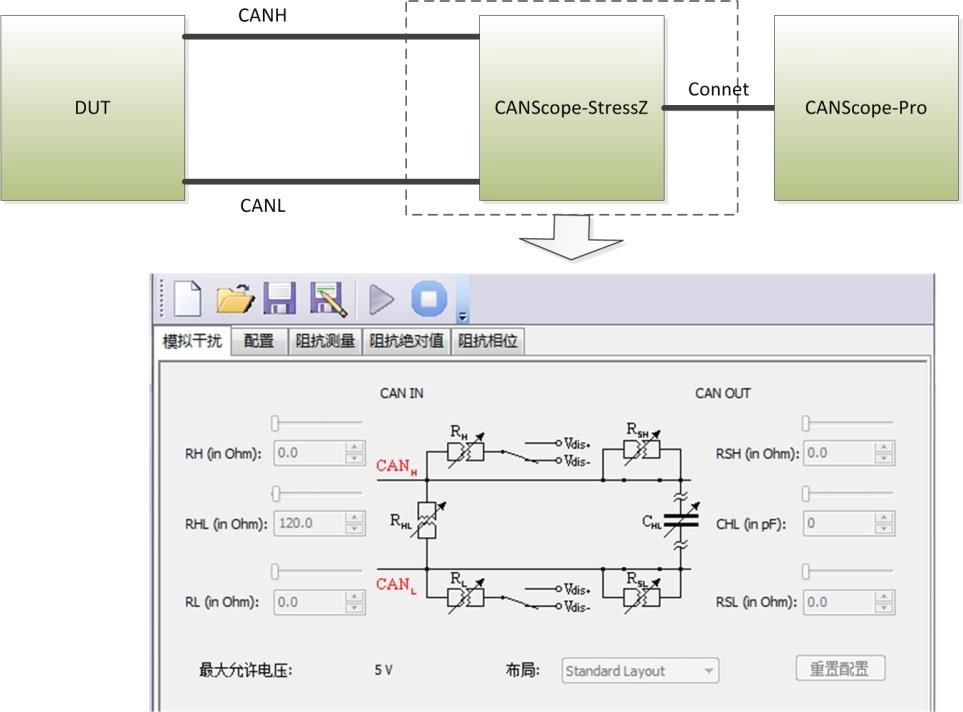
圖14 等效電路功能進行輸入電容電阻等測試


- 0 個商品